Defesas & Seminários
Titulo : "METODOLOGIA PARA REDUÇÃO DE INCERTEZA NA DETECÇÃO DE OBSTÁCULOS
EM NAVEGAÇÃO DE VEÍCULOS TERRESTRES AUTÔNOMOS BASEADOS EM VISÃO
ESTÉREO".
Orientador : Fernando A. de Noronha Castro Pinto
Data: 27/02/2023
Hora: 9h
Local: remota/LAVI-I-130
Título: Modelo de duas escalas para estudo numérico da acidificação em meios porosos considerando ácidos com comportamento reológico complexo.
Orientador: Roney Leon Thompson
Banca:
1) Roney Leon Thompson (Orientador) - PEM/COPPE/UFRJ
2) Daniel Onofre de Almenida Cruz (Membro interno) - PEM/COPPE/UFRJ
3) Luiz Fernando Lopes Rodrigues Silva (PEQ-UFRJ)
4) Paulo Couto (Departamento de Engenharia Industrial - UFRJ)
5) Edson José Soares (Departamento de Engenharia Mecânica - UFES) membro externo
Data: 19/12/2022
Horário de início: 9h
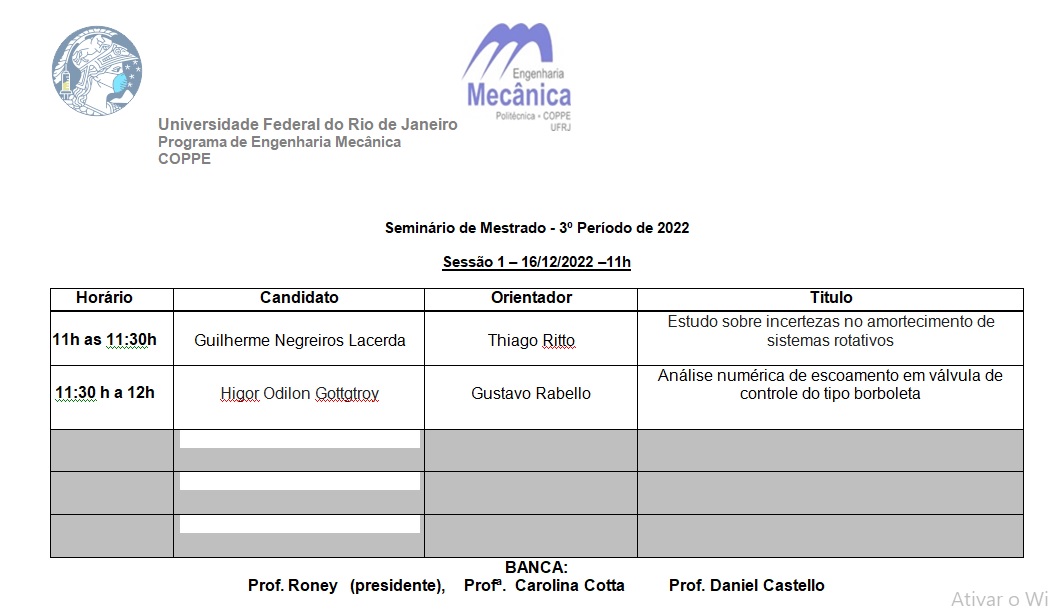
Seminário de Mestrado do PEM
Sexta-feira, 16 de dezembro · 11:00 até 13:00
Informações de participação do Google Meet
Link da videochamada: https://meet.google.com/vzz-ezay-twd
Ou disque: (US) +1 631-910-9075 PIN: 776 476 198#
Principal
Área Restrita
Acompanhe
